Pendulum Simulation#
In this session, we will simulate the motion of a simple pendulum using the Forward Euler method. We will define system parameters, simulate its motion, and visualize the results.
1. Define the System Parameters#
The system parameters include the mass of the pendulum, the length of the rod, gravitational acceleration, and optional damping.
[51]:
import numpy as np
g = 9.8
r = 1
2. Define the Simulation Parameters#
Simulation parameters define how the simulation is executed, such as the time step for the numerical method and the total simulation time.
[ ]:
[52]:
time = 0
sim_time = 20
dt = 0.01
3. Prepare Data Storage#
To analyze and visualize the simulation, we will store the system’s state (e.g., angular displacement and velocity) at each time step.
[53]:
theta_data = []
omega_data = []
time_data = []
4. Define Initial Conditions#
The initial conditions determine the starting state of the pendulum, such as its initial angle and angular velocity.
[54]:
theta = 0
omega = 10
# Store data for initial time step
theta_data.append(theta)
omega_data.append(omega)
time_data.append(time)
5. Write the Forward Euler Solver#
The Forward Euler method is a simple numerical technique to approximate solutions to differential equations. We will use it to update the system’s state step by step.
[55]:
i = 0
while time <= sim_time:
theta = theta_data[i] + omega_data[i] * dt
omega = omega_data[i] + (-g/r * np.cos(theta_data[i]) - 0.1*omega_data[i])*dt
# Progress time
time = time + dt
i = i+1
# Store data for initial time step
theta_data.append(theta)
omega_data.append(omega)
time_data.append(time)
Note#
During the lecture, I did not implement the forward Euler equation correctly.I used the newly updated \(\theta\) to update the \(\omega\)-equation, rather than the previous value.
I have updated this by pulling the previous value $ \theta`(t_i) $ instead of $ :nbsphinx-math:theta`(t_{i+1}) $ from the stored data.
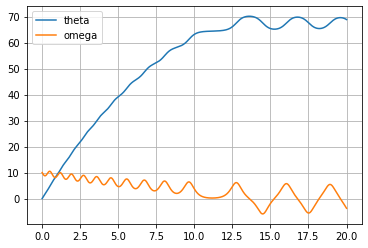
6. Visualize the Results#
Visualization helps us understand the dynamics of the system. We will plot the angular displacement over time and the phase space trajectory.
[57]:
import matplotlib.pyplot as plt
plt.plot(time_data, theta_data, label="theta")
plt.plot(time_data, omega_data, label="omega")
plt.legend()
plt.grid(True)
plt.show()
7. Conclusion and Discussion#
Summarize the key points of the session and explore further ideas such as adding damping or changing the time step.
[ ]: